These days are being very exciting at GMV premises. magicPPP team is performing an experimentation campaign to demonstrate the performances of the our end-to-end solution (Correction service & PPP client) and assess its suitability for liability and safety critical applications such as autonomous vehicles, robots, UAVs or autonomous vessels.
Have a look in the next video to the most interesting moments of the tests and discover magicPPP’s capabilities. #DrivingTheFuture #Besafer #magicPPP
Posted in Uncategorized | Comments Off on magicPPP, an all-in-one Positioning Engine: High Accuracy, Dead-reckoning and Safety
The delay produced by the ionosphere is one of the largest sources of error in GNSS positioning. This error is typically removed by using a dual frequency receiver and processing the ionosphere-free combination. However, the usage of a dual frequency receiver increases the cost of the solution several orders of magnitude.
magicFAST is the new approach implemented in magicGNSS to minimize the impact of the ionospheric delay, even in case single frequency receivers are used. With this approach, a network of ground stations measures the ionospheric delay on a set of strategical positions, and this information is used to provide regional corrections to the users.
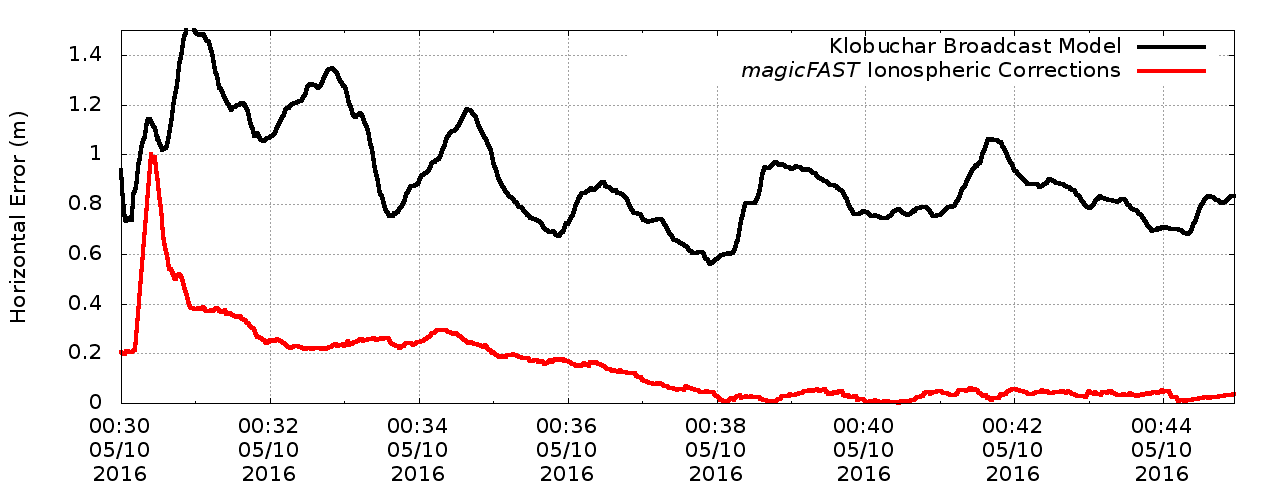
As an example of this new functionality, tests with a low-cost U-Blox NEO-M8T receiver have been performed. In these tests, regional corrections computed with a low-density network of stations (with the nearest station at a distance of around 300 km) have been injected in the PPP processing.
Static open-sky horizontal positioning error
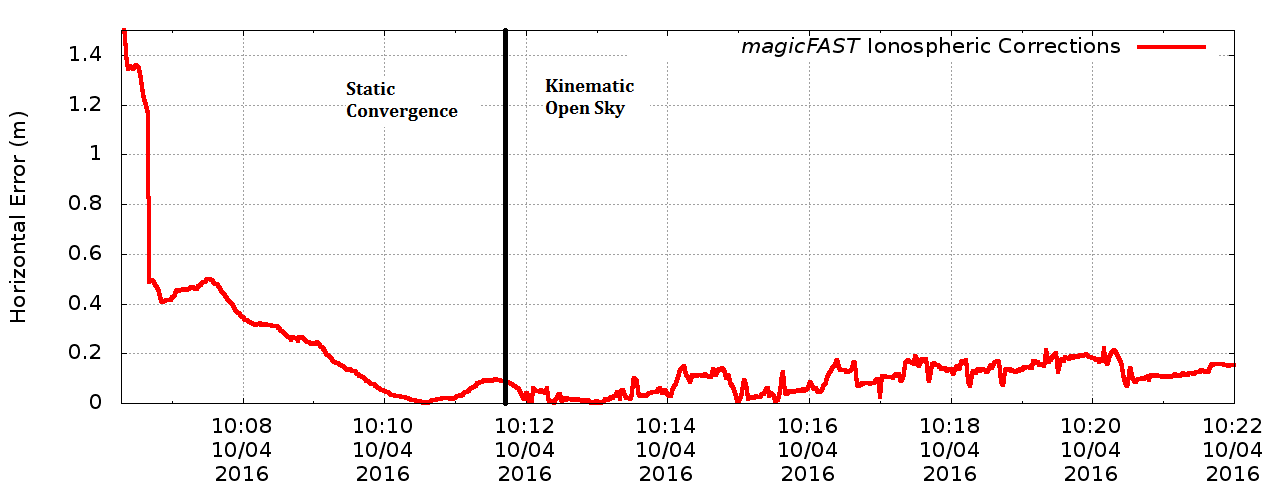
Kinematic open-sky horizontal positioning error
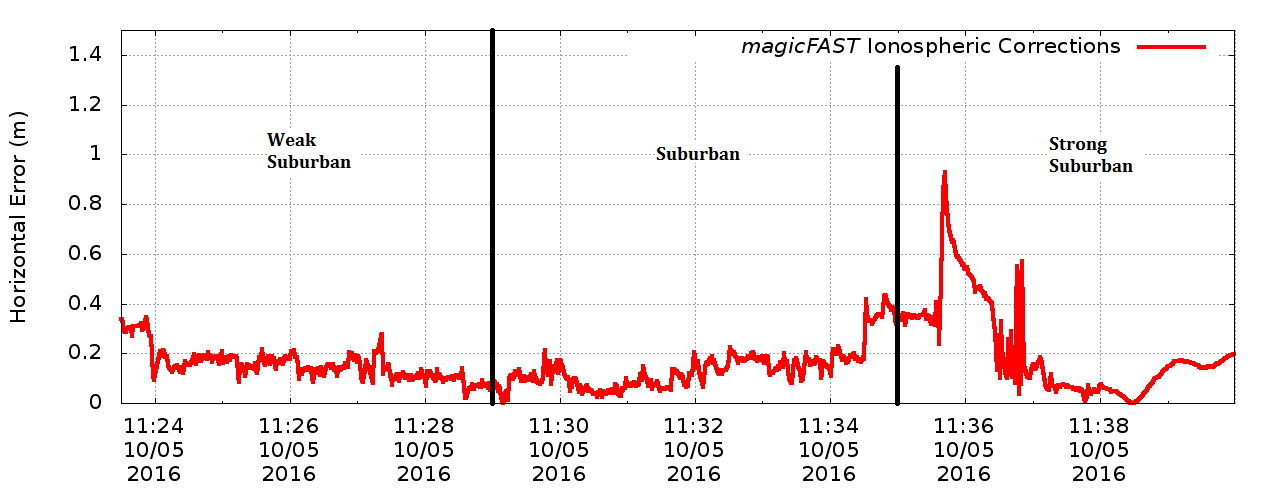
Kinematic suburban horizontal positioning error
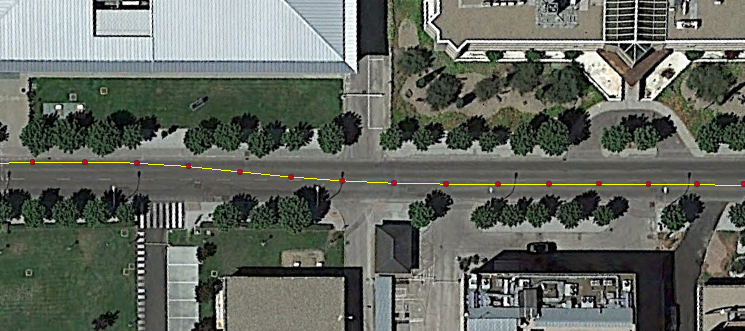
The accuracy achieved using magicFAST allows the implementation of features only reached by high-grade receivers, i.e. lane-change detection.
Lane change detection in urban environment
Estimated (red dots) vs. Reference (yellow line) trajectory
It has been found that magicFAST is capable of providing 20cm of positioning accuracy after only 5 minutes of PPP convergence and maintain these performances both in open sky and suburban environments with a low-cost receiver and a patch antenna.
Posted in Uncategorized | Comments Off on magicFAST: Regional corrections for improving real-time PPP
Although reported as still under commissioning (http://www.gsc-europa.eu/system-status/Constellation-Information), after some apparent initial SIS tests, the 2 new FOC satellites; GSAT0208 (E08) and GSAT0209 (E09), seem to be usable already. Some initial figures are shown below.
Satellite code-phase and carrier-phase residuals:
The following plot shows the GSAT0208 and GSAT0209 apparent clock estimations with respect to WTZR MGEX station:
The orbit and clock overlapping show comparable ODTS consistency compared to the other Galileo satellites.
The aforementioned shows that pending finishing GSAT0208 and GSAT0209 commissioning, there are already 11 Galileo usable satellites!
Posted in Uncategorized | Comments Off on Already 11 Galileo satellites up and running
magicGNSS will be present at the fifth International Colloquium on Scientific and Fundamental Aspects of the Galileo Programme, presenting “MagicPPP in your Pocket: a Smart, Portable and Efficient Multi-GNSS High-accuracy Solution”.
magicPPP Android OS mobile application has been created with a very ambitious objective: to become the reference point for a new generation of GNSS applications and services. magicPPP has completed its portfolio of capabilities by adding two novel characteristics; single-frequency PPP processing and multi-GNSS constellations support. Hence, this new magicPPP version, together with an external receiver and a stream of accurate satellite products, provides an integrated PPP/RTK solution able to join in one single mobile application the algorithms needed by advance GNSS users, and also make available the GNSS high-accuracy technology to a new market segment that cannot afford the cost of acquiring multiple high-end multi-frequency receivers.
The single-frequency PPP data processing capability incorporated in magicPPP represents the cornerstone where a new GNSS concept will be sustained, Low Cost Precise Point Positioning. Supporting single-frequency receivers means extending magicPPP solution to a huge range of low cost devices, which can now navigate with decimeter-level accuracy. Our PPP algorithms have been enhanced to reduce the effect of the ionospheric delay, cope with different levels of measurements quality and work in harder environments.
The second novel point is the multi-GNSS support; it is a key evolution to improve the positioning solution at user level. The number of available satellites grows every year, and the possibility of processing all of them helps to improve the accuracy of the PPP solutions. In this sense, magicPPP has been upgraded to support all the available frequencies and services of GPS, GLONASS and Galileo, furthermore it has been designed to include new GNSS constellations as QZSS and Beidou with low development effort.
These advanced functionalities have been surrounded with a flexible and powerful android application focused on achieving the best user experience. Three key characteristics have been considered critical for the users, receiver management, session and singular points recording and compatibility with third party applications and data consuming.
PPP in your pocket is already here, watch it below!!!
Posted in Announcements, Events | Comments Off on magicGNSS at the fifth International Colloquium on Scientific and Fundamental Aspects of the Galileo Programme
After its launch back on March 27 , Galileo-FOC FM4 (GSAT0204) started transmitting on May 21th at about 11:32 UTC, being tracked at that time by the International GNSS Service Multi-GNSS Experiment tracking station in Windhoek, Namibia with PRN E22 (http://gpsworld.com/newest-galileo-satellites-now-transmitting/).
As for the previous FOC satellites, a magicODTS scenario has been configured using MGEX station data for May 23rd and May 24th, and setting WTZR as reference station.
The obtained results are below. Satellite code-phase and carrier-phase residuals:
The following plot shows the Galileo-FOC FM4 apparent clock estimation w.r.t WTZR station:
Following you can find the GPS and Galileo clock stability:
From the above results it seems as the IOT for Galileo-FOC FM4 is running quite smoothly, let’s hope Galileo-FOC FM3 starts transmitting soon too!













{kind=link}