polaris
September 16th, 2010 by Angel GavínDescription:
The use of additional sensors and systems with GNSS improves navigation performances and open the way for new mass-market and professional applications. The demonstration of the levels of performance that can be expected using current and future positioning technologies will create new opportunities for industry.
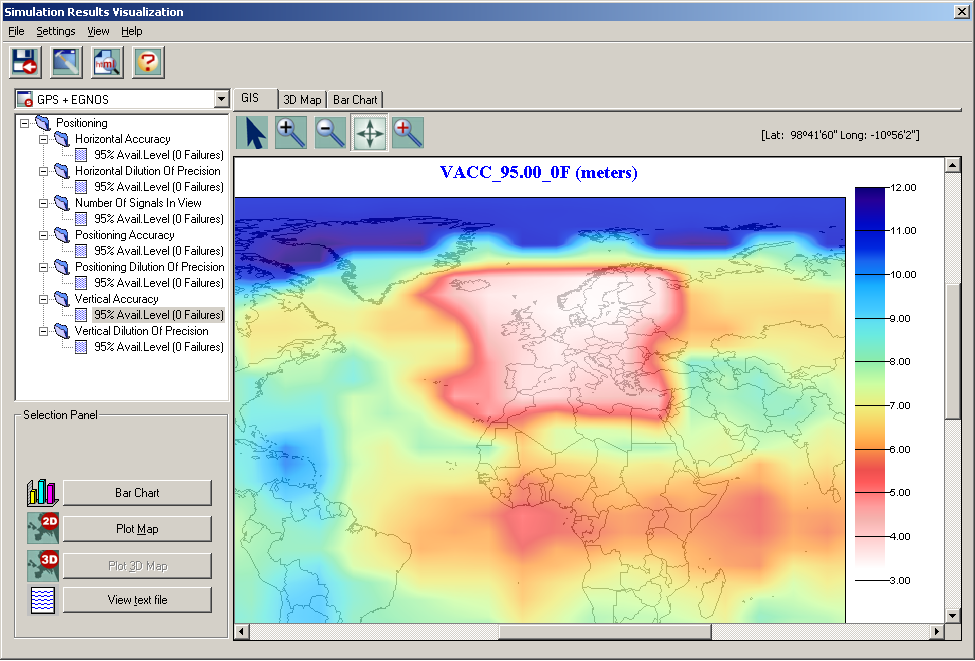
polaris is a software tool that allows the rapid evaluation of navigation performances for different user applications in different environments.

polaris provides the means to demonstrate the benefits to be gained with a wide variety of combinations of systems and sensors in different user environments.
{kind=link}
Category: Service Module Simulator
Contact Person: [email protected]
Website: http://www.polarisgmv.com/
Operating System: Windows
Intellectual Property: GMV
Keywords: Simulator, Performance, DOP
Supported Systems: GPS, GLONASS, Galileo, SBAS
Inputs:
Roughly speaking, polaris takes the following inputs:
- Navigation systems configuration: The following navigation systems are supported:
- GNSS systems, like GPS or Galileo
- Regional differential corrections (SBAS), like EGNOS or WAAS
- Local differential corrections (differential GNSS)
- Local augmentations, including pseudolites and radio mobile (GSM / GPRS / UMTS) positioning
- User terminal characteristics: Which naviagation systems and services will be used. Each navigation service is characterised with its User Equivalent Range Error (UERE). User terminal may also include navigation sensors (like, for instance, odometers, accelerometers, etc) for the evaluation of dynamic users.
- User position(s) and environment: Which true user location(s) will be evaluated, as well as environment characteristics in terms of visibility (masking or horizon angle).

Outputs:
[Additional sections with snapshots, documentation, etc]